La robótica se inspira en los pulpos: investigadores italianos crean un robot submarino inteligente que imita el comportamiento de sus tentáculos
Dos tercios de los 500 millones de neuronas del pulpo se encuentran en sus brazos. Eso significa que cada tentáculo puede procesar información con cierta autonomía: detectar un objeto, evaluarlo y ajustar la presión de las ventosas sin esperar respuesta del sistema nervioso central. Los ingenieros llevan décadas estudiando esa arquitectura como modelo para la robótica.
Podría afirmarse que, hoy, el diseño de un robot submarino inteligente capaz de manipular objetos en fondos marinos es uno de los retos más complejos de la robótica blanda. La presión del agua, la escasa visibilidad y la irregularidad de las superficies hacen que los sistemas de agarre convencionales fallen donde el pulpo opera sin dificultad.
El robot submarino inteligente del IIT que aprende a agarrar como un pulpo
Investigadores del Instituto Italiano de Tecnología (IIT) de Génova han presentado una respuesta al desafío mencionado. Se trata de un brazo robótico, desarrollado en el Laboratorio de Robótica Blanda Bioinspirada de la institución italiana, bajo la dirección de Barbara Mazzolai, directora asociada de Robótica del instituto.
El estudio, firmado por Del Dottore, Adhami, Shahabi, Solfiti, Martini, Mariani, Parmiggiani, Mondini, Sinibaldi y Mazzolai, fue publicado en la revista Nature Machine Intelligence.
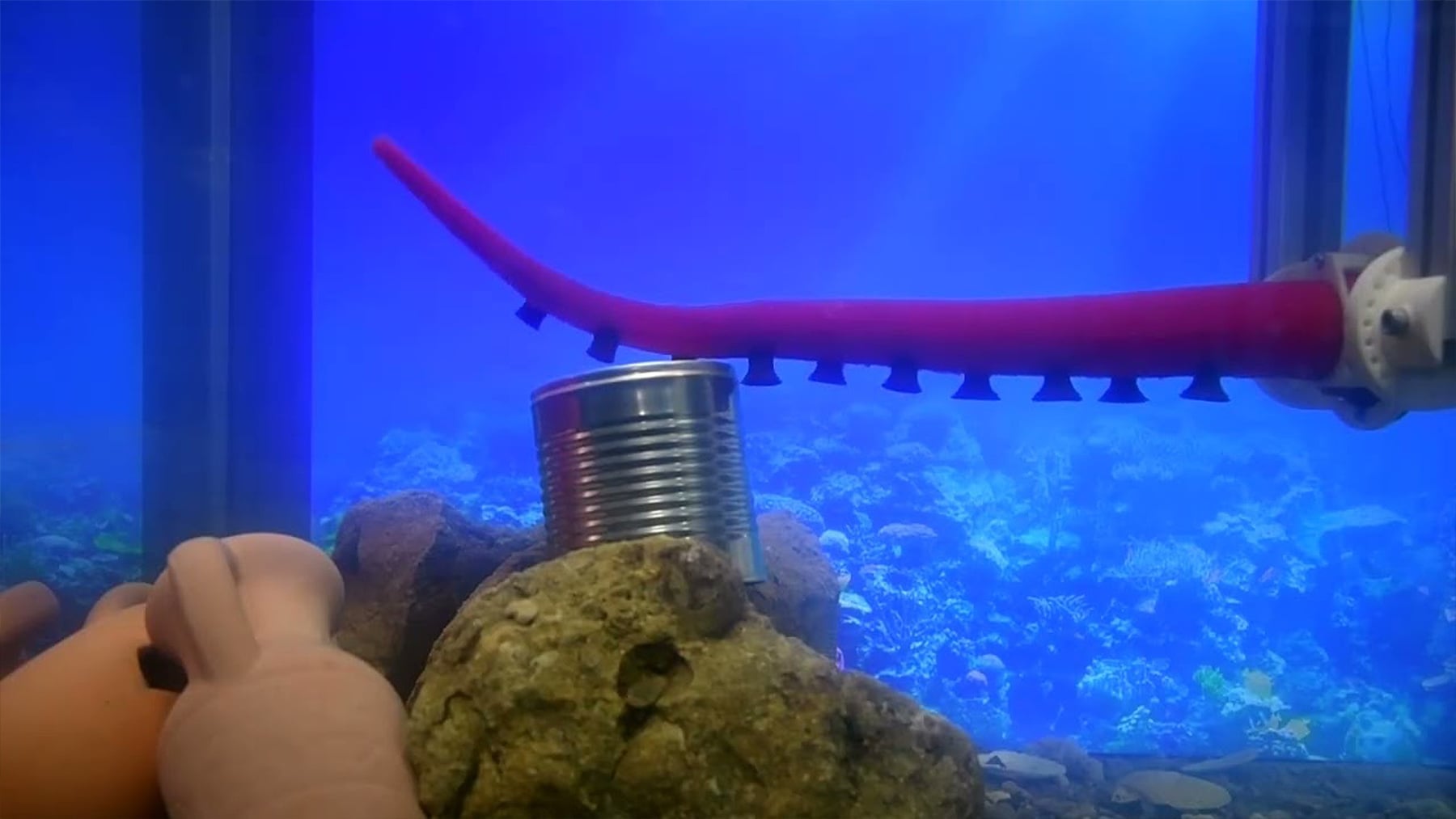
El prototipo mide 41 centímetros, tiene forma cónica y está fabricado en silicona flexible. Lleva integradas diez ventosas de distintos tamaños (entre 12 y 20 milímetros de diámetro), cada una equipada con sensores optoelectrónicos compuestos por LEDs y fototransistores.
Esos sensores detectan la deformación del material cuando la ventosa entra en contacto con una superficie. A partir de ese dato, el sistema infiere si ha tocado algo, con qué fuerza y desde qué ángulo, sin necesidad de cámara ni de instrucción externa.
La capacidad más destacable del prototipo es que todo ese procesamiento ocurre en el brazo, no en un ordenador central. El robot puede detectar el contacto, estimar el peso del objeto y adaptar el agarre en tiempo real, de la misma manera que lo haría un tentáculo real.
La arquitectura nerviosa del pulpo como modelo de inteligencia distribuida
El pulpo distribuye su sistema nervioso de una forma radicalmente distinta a la de los vertebrados: solo un tercio de sus neuronas se concentra en el cerebro; los dos tercios restantes se reparten entre los brazos. Ese diseño permite que cada extremidad funcione con cierta autonomía, tomando decisiones locales sin saturar el sistema central.
Ese principio de «control periférico» es lo que los ingenieros del IIT intentaron replicar. En lugar de concentrar toda la computación en un procesador externo, diseñaron un brazo en el que la información sensorial se genera y procesa en el propio punto de contacto.
Desde luego, el resultado es una respuesta más rápida y adaptable ante superficies irregulares o condiciones cambiantes.
Cabe señalar aquí que la robótica submarina convencional depende de cámaras para guiar el agarre, lo que introduce limitaciones evidentes en aguas turbias o con poca luz.
El sistema del IIT prescinde de la visión en la fase de contacto. Y esto porque los sensores optoelectrónicos de las ventosas trabajan táctilmente, igual que los receptores mecanosensoriales de las ventosas del cefalópodo real.
Qué puede hacer este robot submarino inteligente: de la arqueología al mantenimiento de infraestructuras
Durante las pruebas, el brazo manipuló objetos de distintas formas y materiales en entornos acuáticos, manteniendo la sujeción incluso cuando las condiciones variaban. El prototipo es capaz de identificar la orientación de un objeto, estimar su peso y ajustar la presión de agarre sin recibir instrucciones externas.
Las aplicaciones previstas abarcan tres áreas principales, señaladas abajo:
- Exploración y biología marina: el brazo puede manipular organismos frágiles sin dañarlos, algo que los robots de sujeción rígida no garantizan.
- Arqueología submarina: permite extraer piezas del fondo sin el riesgo de rotura que supone un agarre de presión fija.
- Mantenimiento de infraestructuras: cables, plataformas y tuberías en zonas de difícil acceso para operarios humanos.
Por su parte, el equipo del IIT describe el prototipo como uno de los primeros manipuladores blandos con sensores táctiles integrados directamente en la ventosa, no añadidos como componente externo. Esa integración es la que hace posible la respuesta autónoma en tiempo real.
Génova como referente europeo de la robótica blanda bioinspirada
El Instituto Italiano de Tecnología lleva más de una década desarrollando sistemas robóticos inspirados en organismos vivos, con atención especial a los invertebrados marinos. El laboratorio de Mazzolai ha trabajado también con la biomecánica de las raíces vegetales para diseñar robots capaces de penetrar en terrenos irregulares.
La publicación en Nature Machine Intelligence, una de las revistas de mayor impacto en inteligencia artificial aplicada a la robótica, sitúa al equipo genovés entre los referentes actuales de la disciplina.
Para cerrar la noticia con un dato curioso, en el campo de la robótica submarina blanda, el IIT compite con laboratorios de Estados Unidos, Japón y el MIT en el desarrollo de sistemas capaces de operar en entornos no estructurados.
Lo último en Ciencia
-

Perplejidad entre los paleontólogos: confirman en Argentina el fósil de un cocodrilo cretácico que cazaba fuera del agua hace 100 millones de años
-
Un hallazgo en el Ártico obliga a los investigadores a replantearse cómo está cambiando uno de los ecosistemas más frágiles del planeta
-
Científicos de la UCO aumentan la producción de cereal con menos fertilizantes: la clave es una bacteria que fija el nitrógeno, y el agricultor gana 96 € más por cada hectárea
-
Descubren una ciudad maya que permaneció oculta más de 1.000 años bajo la selva: pirámides, altares y un hallazgo que reescribe la historia
-
El asteroide Apophis podría ser visible para el 90% de la población de la Tierra durante su sobrevuelo: será en el año 2029





Últimas noticias
-
El magrebí que atacó a tres personas con un hacha en un pueblo de Granada será juzgado por terrorismo
-
Por qué dijo Marco Aurelio: «Tienes poder sobre tu mente, no sobre los acontecimientos externos»
-
Gabón, Mauritania, Uzbekistán, Venezuela… los 31 países que superan a España en arbitraje
-
El enigma de las nueve monedas de oro que salvó una iglesia histórica del cierre: nadie sabe quién las dejó bajo el altar
-
Avance de ‘Sueños de libertad’ hoy, 22 de julio: Andrés amenaza a Gabriel



