Italia se inspira en China y crea un perro-robot IA que recoge el 90% de las colillas enterradas en la playa
Un perro-robot IA desarrollado por el Instituto Italiano de Tecnología (IIT) de Génova nació con un objetivo concreto: atacar un problema de contaminación que la maquinaria de limpieza convencional no puede resolver. Su diseño parte de una plataforma cuadrúpeda de origen chino a la que los investigadores genoveses añadieron un sistema de visión artificial propio.
Lo que distingue a este robot de cualquier otra solución de limpieza es su capacidad para moverse sobre arena blanda, escaleras o grava sin perder estabilidad, mientras sus boquillas trabajan al ras del suelo. La IA integrada toma cada decisión en tiempo real: cuándo aspirar, cuándo detenerse y cómo trazar el camino más eficiente dentro del área marcada.
Donde los tractores no llegan: el perro-robot IA que recoge las colillas de la playa
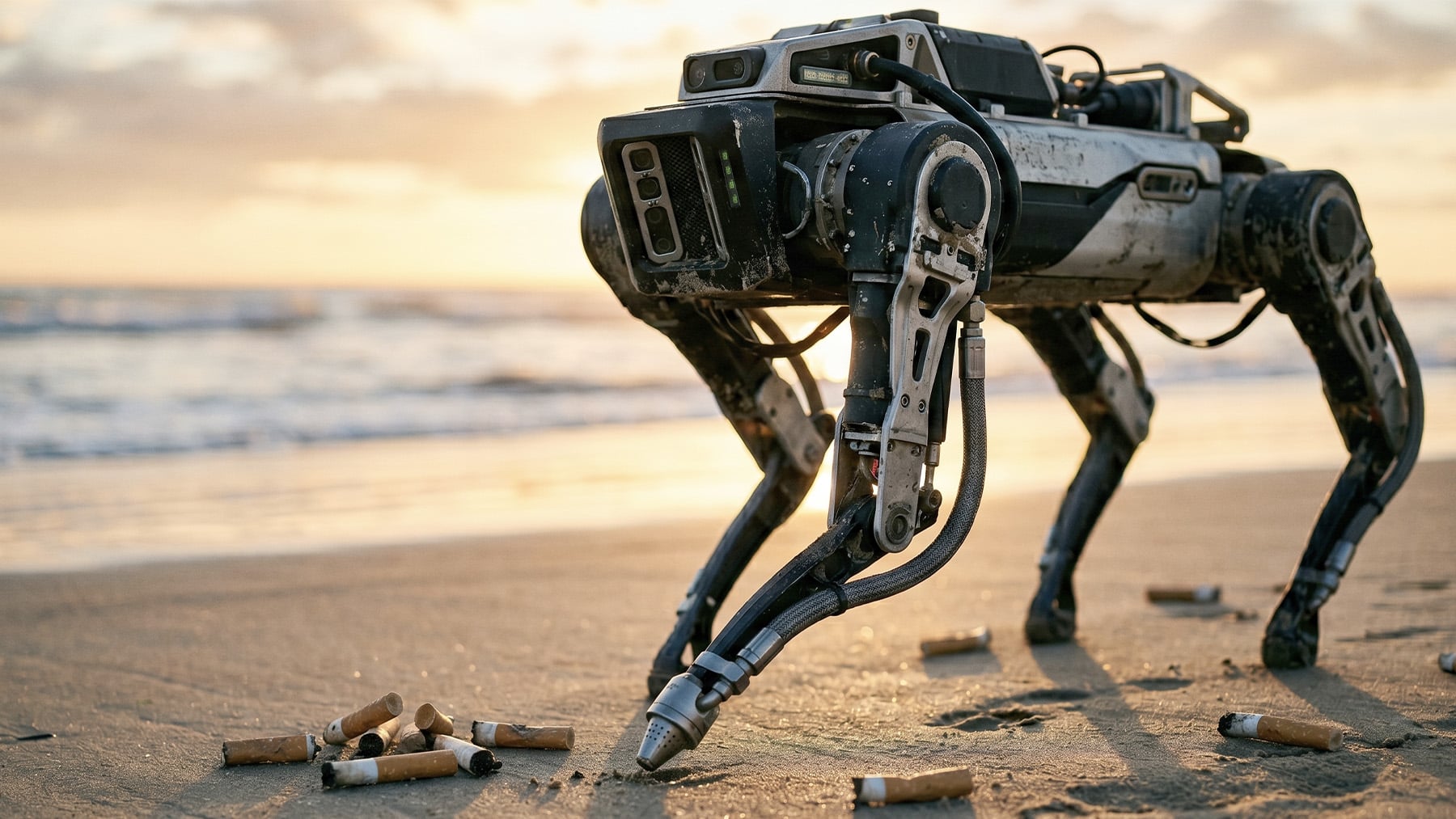
VERO, siglas de Vacuum-cleaner Equipped RObot, es un robot cuadrúpedo que combina locomoción autónoma sobre superficies irregulares con un sistema de aspiración integrado. En las pruebas iniciales logró recoger hasta el 90% de las colillas detectadas, incluidas las que quedaban enterradas en la arena blanda.
Los resultados del estudio, publicados en la revista Journal of Field Robotics por investigadores del IIT, detallan que VERO fue validado en seis entornos distintos: playas, parques, zonas pavimentadas, grava, escaleras y parques infantiles.
En lo que respecta a los elementos que lo componen para funcionar, el equipo científico aplicó sobre la plataforma Unitree AlienGo una unidad de aspiración de dos kilos instalada en el lomo del robot.
Desde ahí, unas mangueras recorren cada una de las cuatro patas hasta unas boquillas impresas en 3D situadas junto a los pies, lo que permite aspirar al ras de la superficie mientras el robot sigue caminando.
Cómo funciona la IA del perro-robot para distinguir colillas de arena
El sistema de visión de VERO combina dos cámaras Intel RealSense: una frontal que planifica la ruta y una de profundidad que ajusta la posición exacta de cada pata. La red neuronal fue entrenada con más de 2.000 imágenes de residuos en distintos entornos para aprender a diferenciar colillas de piedras, arena oscura u otros elementos del suelo.
Cuando la IA detecta un objeto con baja confianza, el robot no aspira de inmediato. En cambio, reposiciona su cuerpo para observarlo desde otro ángulo antes de tomar la decisión.
Este comportamiento es imposible para un tractor convencional, que avanza en línea recta aplanando la superficie sin distinguir lo que pasa por debajo. Los algoritmos de Dijkstra calculan la trayectoria óptima para cubrir toda el área asignada sin dejar zonas sin pasar.
¿Por qué los tractores de playa no resuelven el problema de las colillas?
Cada año se desechan en todo el mundo aproximadamente 4,5 billones de colillas. Una parte significativa acaba en playas, donde se hunden en la arena húmeda o quedan enterradas en los primeros centímetros.
Los tractores rastrillo que limpian los arenales a primera hora no están diseñados para residuos de ese tamaño: aplastan la arena conforme avanzan, no distinguen colillas de arena oscura o piedras pequeñas, y operan a horas en que la maquinaria pesada perturba las zonas de anidación de aves costeras.
Además, una sola colilla libera más de 700 sustancias químicas tóxicas al descomponerse en contacto con el agua. El impacto medioambiental es desproporcionado respecto a su tamaño.
El coste y las aplicaciones del robot-perro VERO más allá de la playa
La plataforma Unitree AlienGo sobre la que se construyó VERO tiene un coste de unos 50.000 dólares, lo que limita su despliegue a municipios con presupuesto holgado.
Por eso los investigadores del IIT estudian adaptar el sistema al modelo Unitree Go2, cuyo precio ronda los 1.600 dólares, para hacerlo viable en localidades con menos recursos.
Para concluir, los usos potenciales van más allá de la limpieza de playas. El equipo del IIT contempla aplicaciones en fumigación localizada en campos de cultivo, inspección de fisuras en puentes e infraestructuras y tareas de colocación de materiales en obras.
La característica que los hace útiles en todos esos contextos es la misma: las patas de este perro-robot trabajan a la vez como sistema de locomoción y como herramienta operativa, sin interrumpir el movimiento para ejecutar cada tarea.
El prototipo ya se ha probado en el paseo marítimo de Nervi, Génova, donde 30 estudiantes de la Escuela Internacional de Génova colaboraron en una sesión que terminó con 1.500 colillas recogidas en una sola jornada.
Lo último en Ciencia
-

Se acerca la mayor lluvia de meteoros del verano: fecha y hora de máxima visibilidad en España
-
Transformación ganadera: Galicia lidera un proyecto europeo pionero que automatiza con IA la producción de insectos para fabricar harinas y fertilizantes
-
Científicos de EEUU y Corea del Sur diseñan una ‘nariz artificial’ para los frigoríficos que puede detectar y avisarte si la comida se va a poner mala
-
Nuevo hito histórico para la aviación: la NASA vuela por primera vez un avión eléctrico híbrido a la misma altitud que los de pasajeros
-
Las auroras boreales iluminarán los cielos de España: aquí tienes la única oportunidad de verlas.





Últimas noticias
-
La reflexión de Nadal (40 años) que define su carrera y su vida: «Cuando quieres algo con mucha intensidad, ningún sacrificio es demasiado grande».
-
El príncipe Guillermo y Kate Middleton envían un mensaje de apoyo por los incendios en España: «Estamos con todas las personas afectadas»
-
Bonoloto: comprobar el resultado del sorteo de hoy, miércoles 29 de julio de 2026
-
Comprobar ONCE hoy, miércoles 29 de julio de 2026: Cupón Diario y Super 11
-
La «masculinidad tóxica» causó el atropello en el Orgullo de Berlín




